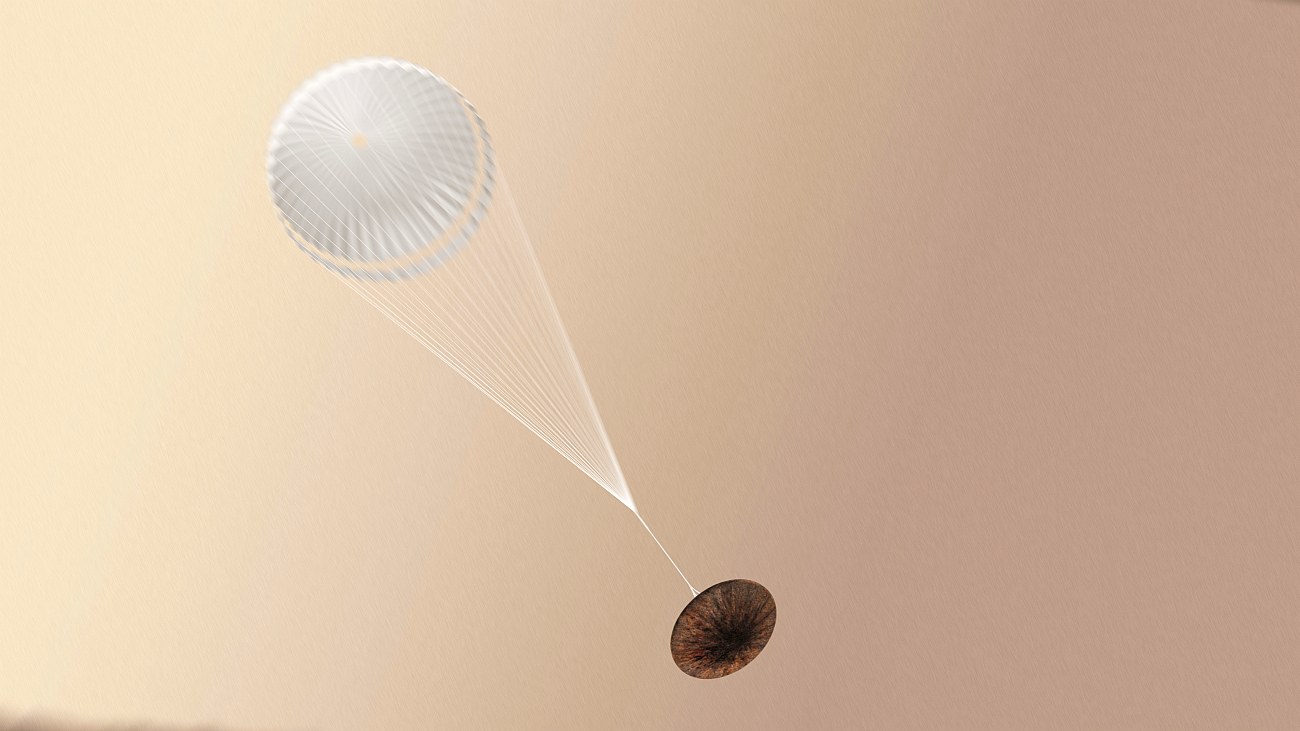
Nicht ausreichend verstandene Dynamik des Fallschirms, ein winziger Programmierfehler bei einem eingekauften Bauteil und ein zu naiv programmierter Zentralcomputer: Die Kausalkette, die am 19. Oktober 2016 zum Absturz des europäischen Marslande-Demonstrators Schiaparelli führte, den die erste ExoMars-Mission dabei hatte, ist lückenlos aufgeklärt – und die Lektionen aus der bitteren Erfahrung könnten die Chancen erste „echten“ Marslandung Europas 2020 verbessern.
Aus einem (vermutlich um Industrie-Geheimnisse) gekürzten Bericht, der diese Woche endlich vorgelegt wurde, und weiteren Auskünften des Leiters der Untersuchung – dem Generalinspekteur der ESA Toni Tolker-Nielsen – heute Abend formt sich nun ein Gesamtbild des Fehlschlags: Es wurde ein ganz konkreter winziger Fehler gemacht, ohne den eine weiche Landung des Entry Demonstrator Module (EDM) alias Schiaparelli sehr wahrscheinlich geglückt wäre – und zugleich gab es etliche fundamentale Versäumnisse an anderen Stellen, wegen denen dieser Fehler überhaupt fatale Folgen haben konnte und unter realen Mars-Bedingungen praktisch musste. Der Schlüssel ist die Inertial Measurement Unit (IMU) ein fertig eingekaufter Messer für Winkelgeschwindigkeiten: Der zentrale Bordcomputer (GNC) berechnet aus den Drehwerten seiner Kreisel die räumliche Lage des EDM, indem sie – nach anfänglicher Eichung mit einem Sonnensensor – fortwährend aufsummiert werden. Bei besonders starken Winkelbeschleunigungen können die Kreisel in Sättigung geraten: Die IMU setzt dann ein Flag, d.h. eine Benachrichtigung an den GNC, dass er keine echten Messwerte mehr bekommt und stattdessen den maximalen normalen Wert verwenden solle, so lange das Flag da ist.
Standardmäßig ist diese IMU vom Hersteller so programmiert, dass das Flag eine Sekunde lang stehen bleibt, egal ob die Sättigung noch vorliegt oder sich die Drehung wieder beruhigt hat. Die EDM-Planer hatten den Lieferanten angewiesen, diese ‚flag persistence‘ stattdessen auf 15 Millisekunden herab zu setzen – aber das wurde bei der ausgelieferten IMU durch ein Versehen vergessen, und man hat es danach auch nie mehr überprüft: Es wurden nämlich nirgendwo während des Abstiegs so heftige Drehbewegungen erwartet, dass eine Sättigung der Kreisel überhaupt eintreten könne. Das war aber falsch, denn der Fallschirm des EDM sorgte beim Entfalten für deutlich stärkere Schläge als nach den europäischen Modellrechnungen der Fall sein sollte. Und das war auch keine Fehlfunktion des Schirms oder ein abnormer Umwelteinfluss sondern völlig normal, stellten – im Laufe der Untersuchung – andere Fallschirm-Experten von der NASA fest! Fallschirm-Ausschlag, kurzes starkes Schwingen von Schiaparelli, Sättigung der IMU, Flag eine Sekunde an: Die direkte Kausalkette der Katastrophe begann. Während der einen fatalen Sekunde addierte der GNC munter immer wieder eine schnelle Drehung des EDM in einer Richtung, bis er „glaubte“, Schiaparelli habe sich um 165° gedreht und stände quasi auf dem Kopf!
In Wirklichkeit schwankte die Kapsel nach dem harten Anfangsstoß aber längst sanft am Fallschirm und bald gar nicht mehr: Dass ein nunmehr stabil kopfstehendes EDM am Schirm physikalisch keinerlei Sinn machte, fiel dem GNC aber nicht auf, dessen Software schlicht keine Plausibilitätschecks machte. Auch nicht, als nach planmäßigem Abwurf des Fallschirms das Landeradar eingeschaltet wurde und – zusammen mit der absurden angeblichen Orientierung des EDM – eine Höhe weit unter der Marsoberfläche berechnet wurde. Das interpretierte der GNC als glückliche Landung – und schaltete das gerade erst eingeschaltete Bremstriebwerk sofort wieder aus: in 3,7 km Höhe. Mit rund 150 m/s schlug Schiaparelli eine halbe Minute später auf. Der Programmierfehler der IMU ist Vergangenheit, der von Russland entwickelte 2020-er ExoMars-Lander wird ein anderes Modell haben – aber ein gutes Dutzend Lektionen über mangelnde Fehlertoleranz und schlechtes Management können seine Chancen verbessern. Schiaparelli hätte diese kaum geliefert, wenn der fatale IMU-flag-persistence-Fehler nicht gemacht worden wäre: Das nun als einen Erfolg darzustellen (zusätzlich zum korrekten Funktionieren immerhin aller EDM-Hardware), geht aber etwas weit …
LINKS:
Der gekürzte Untersuchungsbericht: exploration.esa.int/mars/59176-exomars-2016-schiaparelli-anomaly-inquiry
Pressemitteilung der ESA dazu: www.esa.int/ger/ESA_in_your_country/Germany/Untersuchung_zu_Schiaparelli_-Landung_abgeschlossen
Diskussion über die Lektionen: https://scilogs.spektrum.de/go-for-launch/untersuchungsbericht-zu-schiaparelli-absturz-veroeffentlicht